Profesores desarrollan un nuevo sistema de rehabilitación robótica que se adapta a las reacciones de los pacientes en la terapia
Campus, Elche, Fuente, Investigación, Investigaciones, Noticia
25 septiembre 2014
Los profesores del grupo de Neuroingeniería Biomédica de la Universidad Miguel Hernández (UMH) de Elche Nicolás García Aracil y José María Sabater han desarrollado un nuevo sistema de rehabilitación robótica que se adapta al paciente, y no al revés, durante la realización de la terapia con máquinas. El proyecto, titulado “Asistencia adaptada al paciente: un nuevo concepto de dispositivo robótico de asistencia que se adapta a cada usuario”, se ha publicado en el número de septiembre de la revista internacional “Robotics and Automation Magazine«.
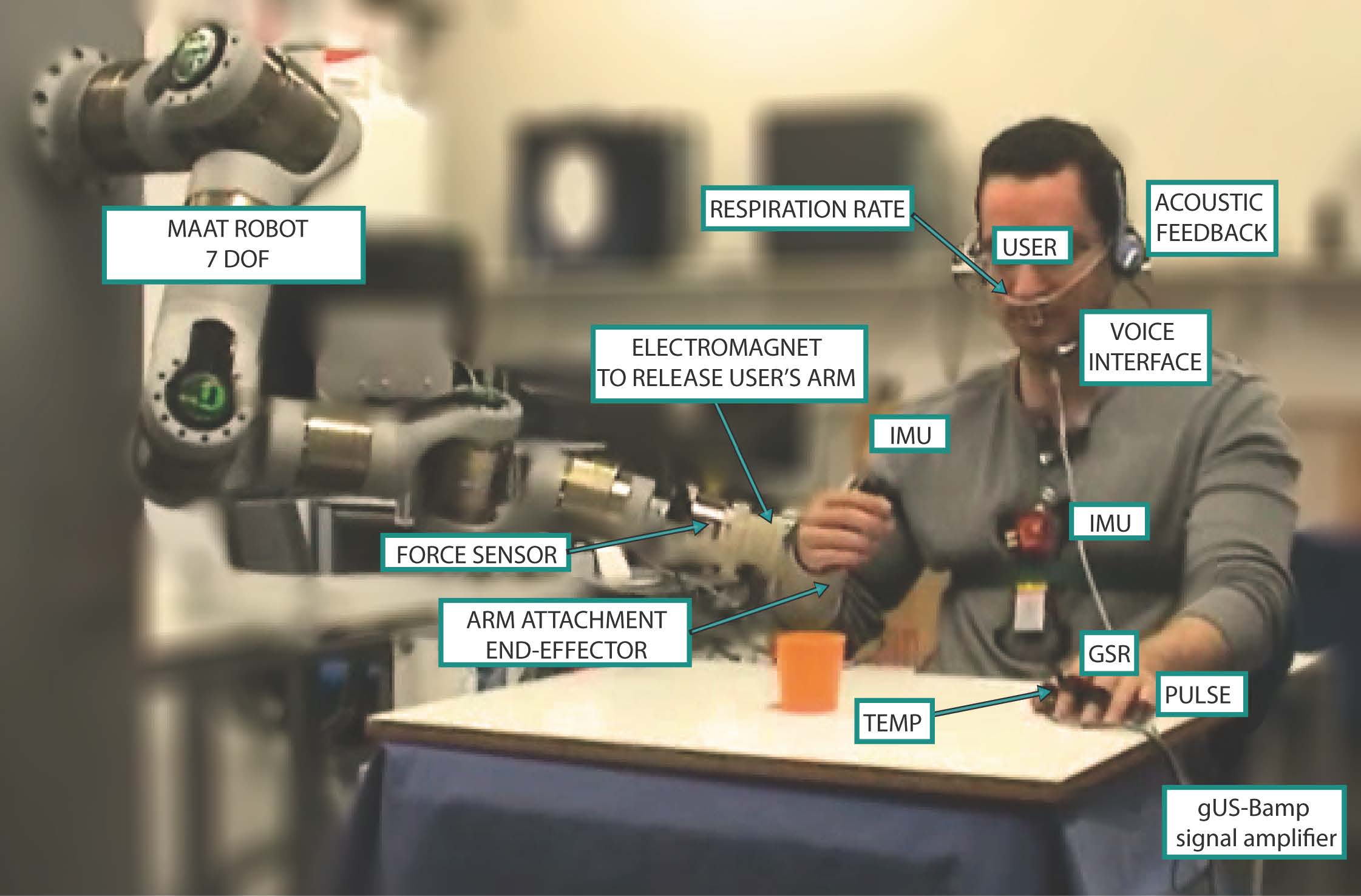
El sistema desarrollado detecta, mediante sensores fisiológicos y otros parámetros del robot, si el paciente se encuentra relajado porque la terapia no le supone ningún desafío. En ese caso, se incrementa la dificultad de la terapia y/o se disminuye la asistencia que proporciona el robot. Si por el contrario, el paciente manifiesta un nivel alto de estrés durante la terapia, el sistema lo detecta y disminuye el nivel de dificultad de la misma. En cada sesión de rehabilitación robótica, los algoritmos de inteligencia artificial del sistema aprenden nuevos parámetros del paciente, que utilizan posteriormente para mejorar el sistema de adaptación de la terapia al paciente. Es decir, el sistema de rehabilitación robótica «va conociendo» mejor al paciente en cada sesión de rehabilitación.
El trabajo presenta algunos de los resultados obtenidos en el proyecto europeo “Interfaces multimodales para mejorar los resultados terapéuticos en la rehabilitación asistida por robot” (en sus siglas en inglés MAAT), financiado por el 7º programa marco de la Unión Europea.
El objetivo del proyecto fue avanzar en el desarrollo de dispositivos robóticos, aplicados a la asistencia o rehabilitación de pacientes. Estos dispositivos se han utilizado durante los últimos años para la rehabilitación y la asistencia a pacientes con distintos tipos de patologías, pero ninguno de ellos se adaptaba dinámicamente a los progresos del paciente durante la realización de la terapia. Por este motivo, en el proyecto MAAT se monitoriza al paciente durante la realización de la actividad terapéutica asistida por un dispositivo y se modifican dinámicamente una serie de parámetros, como por ejemplo el nivel de dificultad de la terapia, el grado de asistencia que proporciona el robot o el sistema de realidad virtual asociado a la terapia. La modificación en tiempo real durante la terapia de estos parámetros maximizan la motivación del paciente durante la realización de la misma. A través de este proceso, se obtienen mejores resultados desde el punto de vista de la recuperación funcional de las capacidades motoras perdidas debido a diversas patologías.
En la actualidad, los avances que se han realizado dentro del proyecto se están terminando de adaptar para llevar a cabo distintas pruebas con pacientes que sufren daño cerebral adquirido en varios hospitales públicos de la provincia de Alicante.
En el marco del proyecto europeo, los investigadores de la UMH Francisco Javier Badesa y Ricardo Morales Vidal han presentado a principios de este año sus tesis doctorales. Ambos profesores han contribuido a que el trabajo se haya publicado en esta revista del campo de la Robótica. También, ha participado en la investigación el profesor de la UMH Carlos Pérez y el coordinador del Grupo de Neuroingeniería Biomédica de la UMH, Eduardo Fernández Jover.
Los investigadores de la Universidad Campus Biomédico de Roma (Italia), que formaban parte del consorcio del proyecto europeo MAAT, son coautores de este artículo, dirigido por el profesor Eugenio Guglielmelli.
La Revista “Robotics and Automation Magazine» publica artículos técnicos de interés para la comunidad científica internacional en temas de robótica y automatización. La publicación tiene más de 12.000 lectores y está clasificada por el Journal Citation Reports (JCR) de Thompson como una de las publicaciones de más alto rango en las categorías de Robótica, de Automatización y Control, con un factor de impacto de 2.484. La revista sólo publica cuatro números al año.