Webinar ‘Observación del modo de ensamblado de robots paralelos mediante Redes Neuronales’
19 octubre 2023
El Grupo de Investigación Automatización, Robótica y Visión por Computador (ARVC) de la Universidad Miguel Hernández (UMH) de Elche ha organizado el webinar ‘Observación del modo de ensamblado de robots paralelos mediante Redes Neuronales’, que se celebrará mañana viernes, 20 de octubre, a las 17:00 horas. Durante la sesión, se presentarán resultados del proyecto ‘Aprendizaje móvil de Inteligencia Artificial y Visión por Computador mediante un laboratorio remoto de robots’, liderado por el profesor del Departamento de Ingeniería de Sistemas y Automática de la UMH Adrián Peidró.
Fuente: UMH
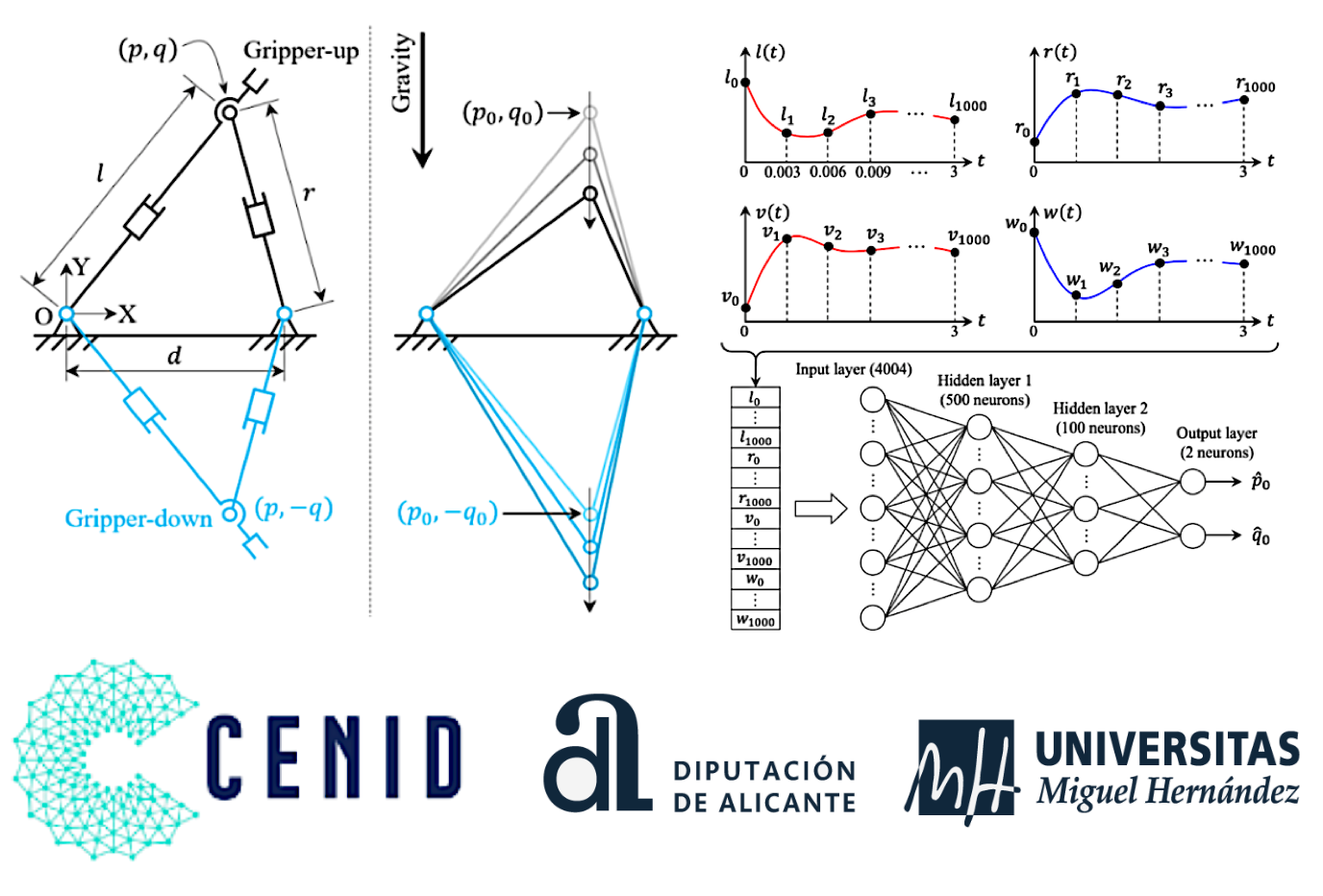
El objetivo del seminario es explorar el uso de redes neuronales para estimar la configuración de robots paralelos sin necesidad de utilizar sensores redundantes. En los robots paralelos, la pinza del robot puede adoptar diversas posiciones, también llamadas ‘modos de ensamblado’, para una misma lectura de los desplazamientos realizados por los actuadores del robot. Esto implica la incertidumbre de cuál de dichas posibles posiciones es la realmente adoptada por el robot, siendo necesario eliminar dicha incertidumbre para realizar su control preciso. Tradicionalmente, este problema se ha resuelto mediante el uso de sensores redundantes que miden el movimiento de otras partes del robot para eliminar la mencionada incertidumbre. Como alternativa, en este seminario se propone el entrenamiento de redes neuronales para detectar u ‘observar’ cuál es el modo de ensamblado correcto de los robots paralelos, midiendo únicamente los desplazamientos de los actuadores del robot y las fuerzas ejercidas por éstos, empleando únicamente señales que están siempre disponibles en los actuadores del robot, prescindiendo así de sensores redundantes.
Esta propuesta forma parte de una serie de prácticas remotas y experiencias de laboratorio, diseñadas para el estudiantado en el marco del proyecto ‘Aprendizaje móvil de Inteligencia Artificial y Visión por Computador mediante un laboratorio remoto de robots’, que ha sido desarrollado en el Instituto de Investigación en Ingeniería de Elche (I3E). Este proyecto está financiado por el Centro de Inteligencia Digital de la Provincia de Alicante (CENID), impulsado por la Diputación Provincial de Alicante, la UMH y la Universidad de Alicante.
La sesión está especialmente dirigida al estudiantado del Máster en Robótica y del Programa de Doctorado en Tecnologías Industriales y de Telecomunicación, aunque estará abierta al público.
Enlace del webinar: https://meet.google.com/kun-gsvm-ybe.
Novedades
Más de 600 personas participarán en la IX Carrera Solidaria de la Facultad...
Profesorado diseña el 30% de las pruebas Spain Skills, las olimpiadas...
El rector participa en Lima en el encuentro de rectores y rectoras Perú-España...
Un estudio asocia el consumo de alimentos ultraprocesados con un mayor...